|
Mechatronics Portfolio - Nick Greco
|


|
|
Mechatronics Portfolio - Nick Greco
|
|
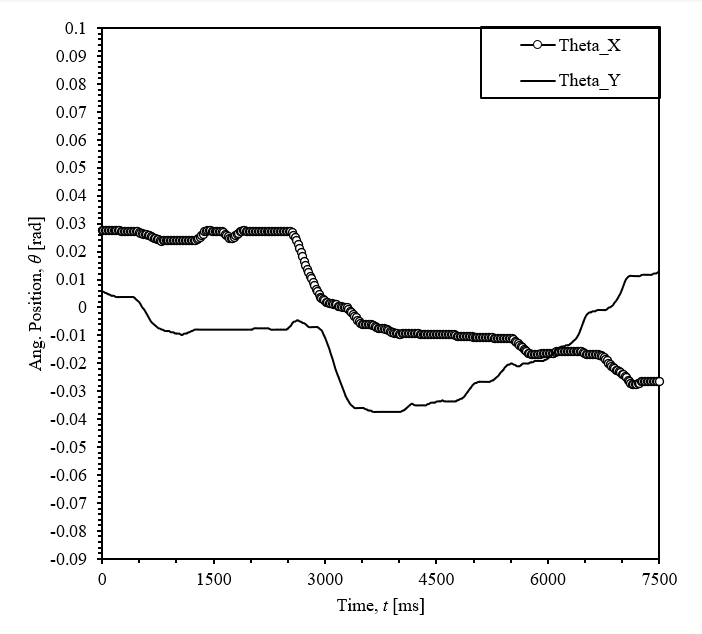
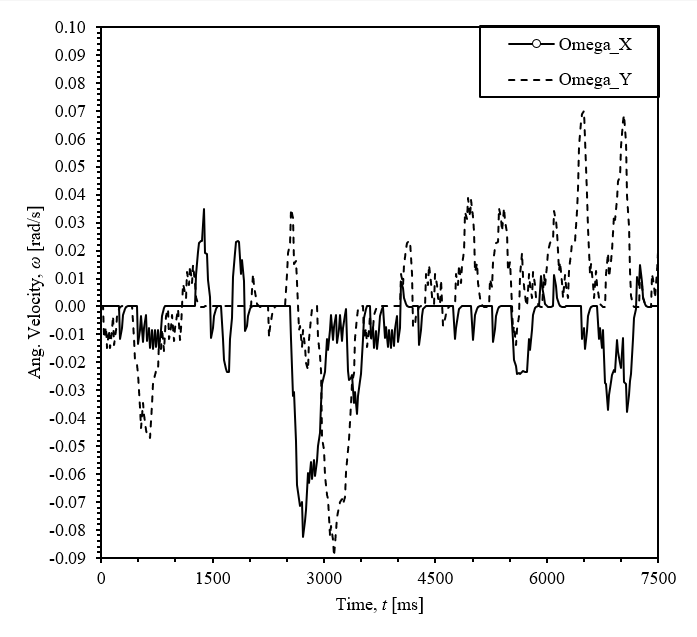
Ultimately, we were able to tune our controller to balance the ball near the center of the platform if the system started at zero initial conditions.
However, if the ball was placed on the platform off center or we pushed the ball with a finger the platform would begin to oscillate and the system would become unstable. The graphs below show the angular postion and velocity of the plate as it is balancing the ball.
Link to Testing video: https://www.youtube.com/watch?v=3qtcu8_9CDg&ab_channel=NicholasGreco