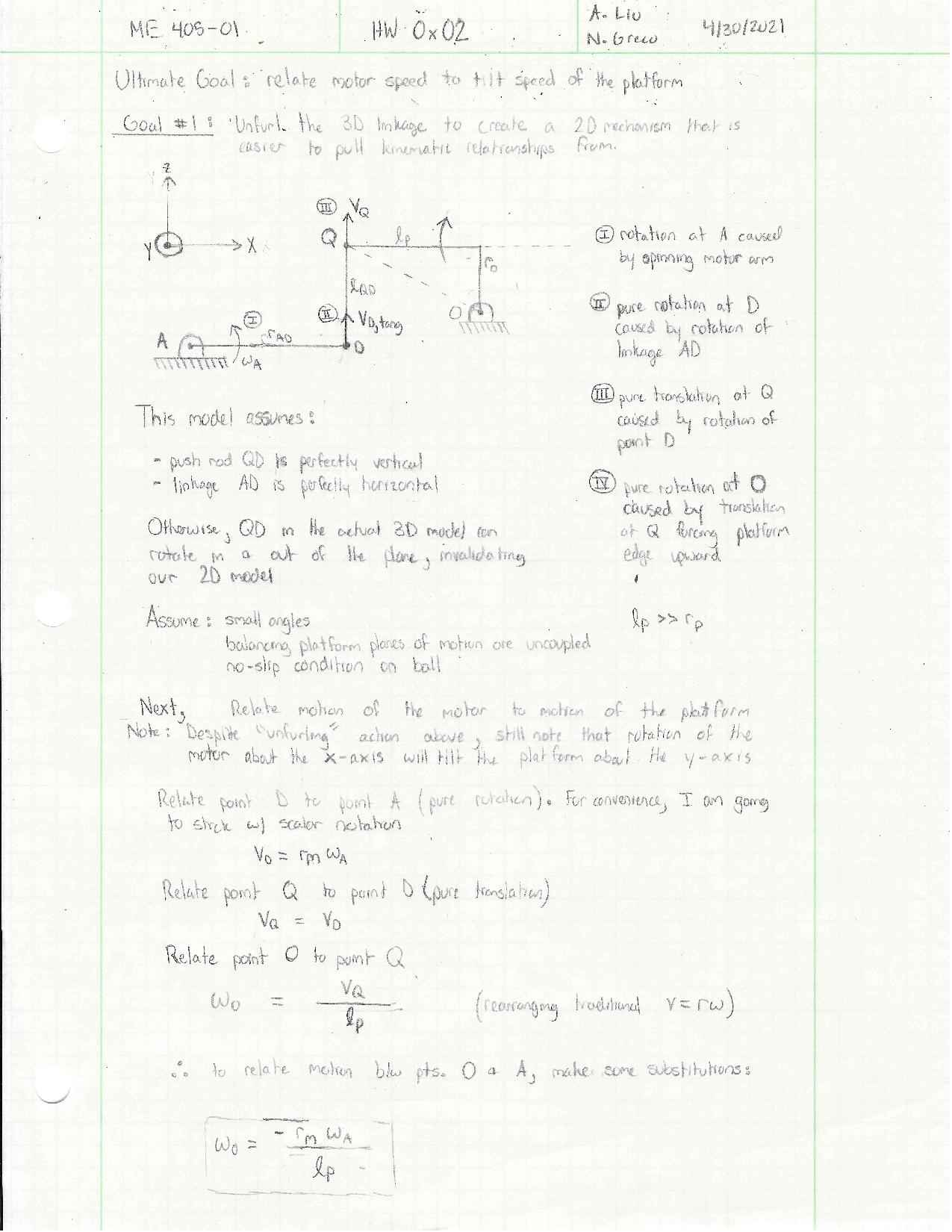
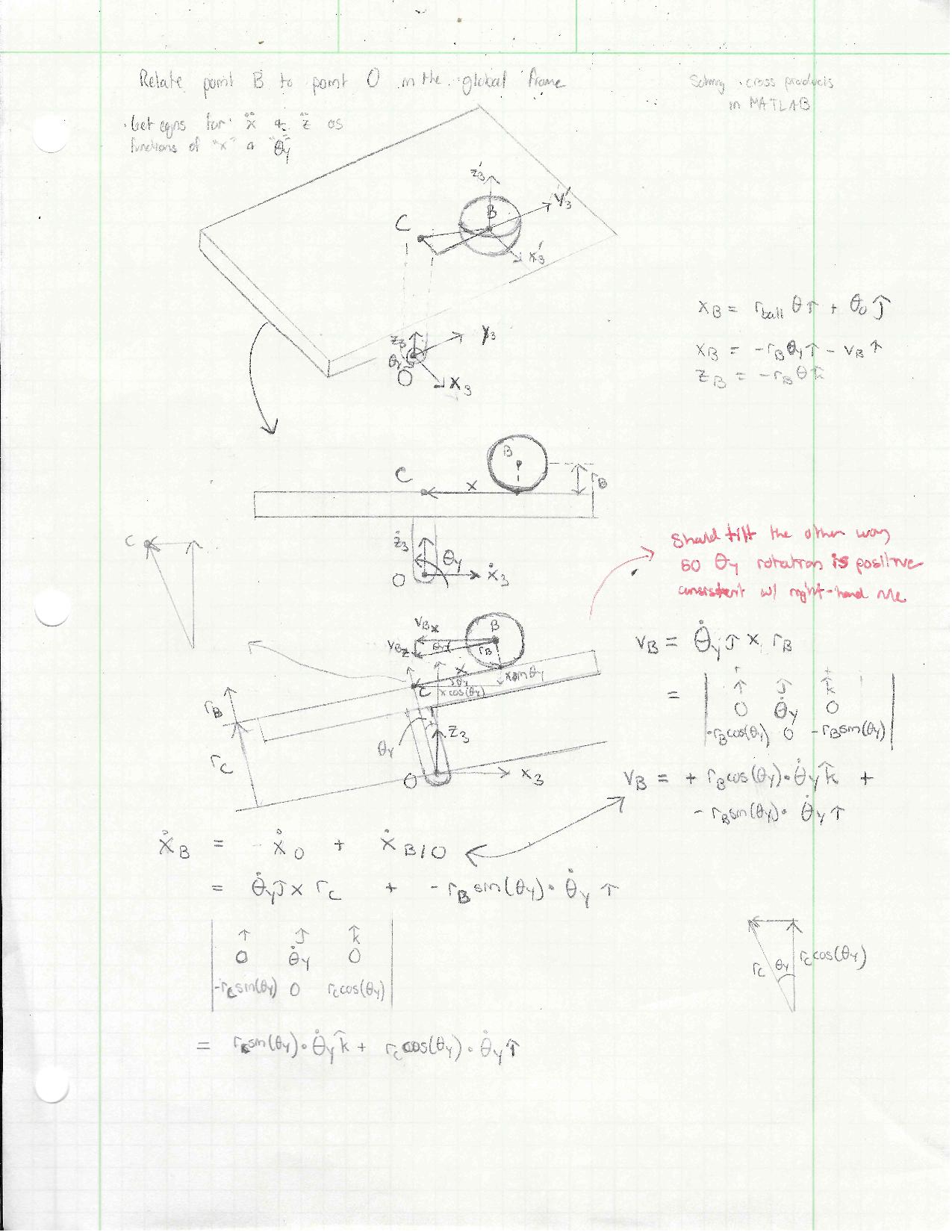
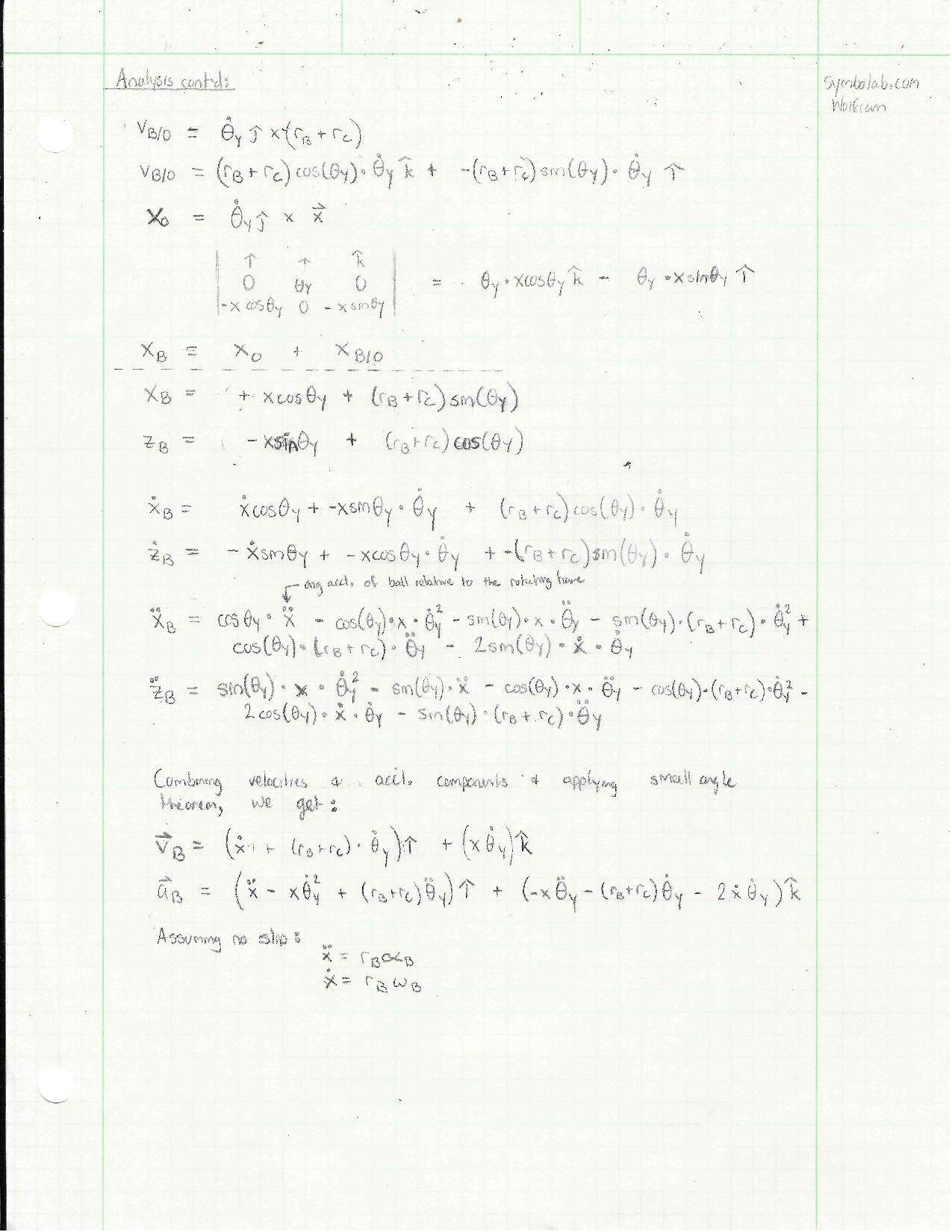
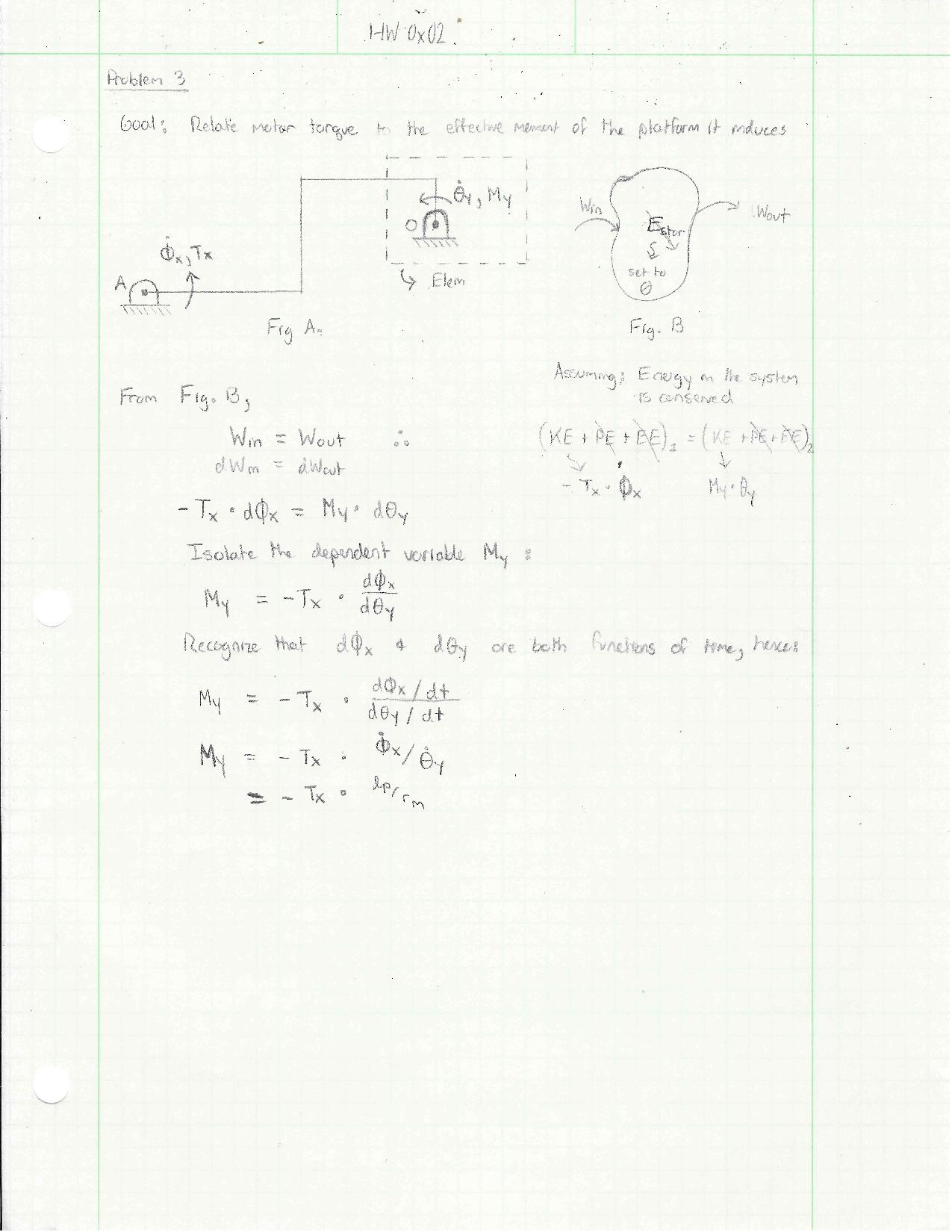
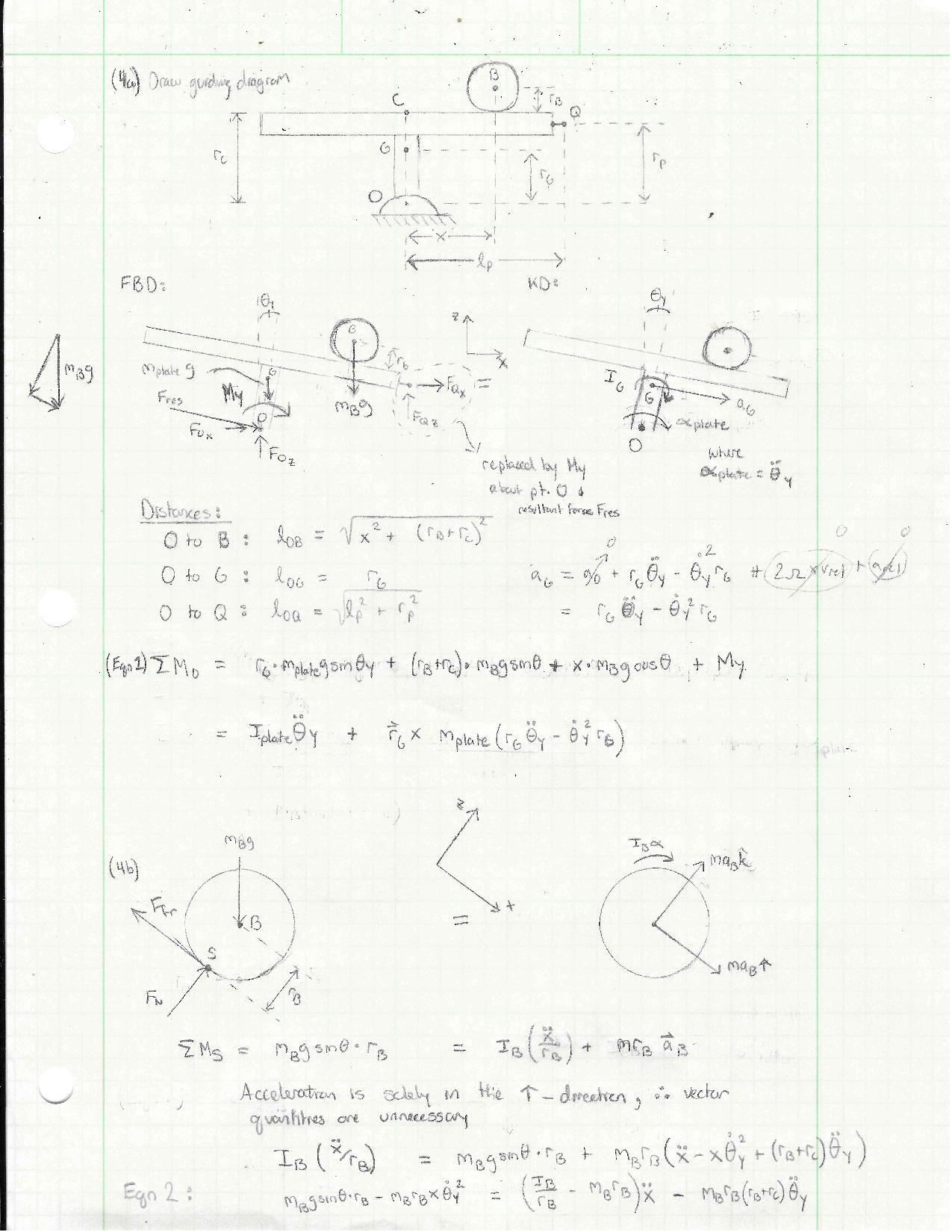
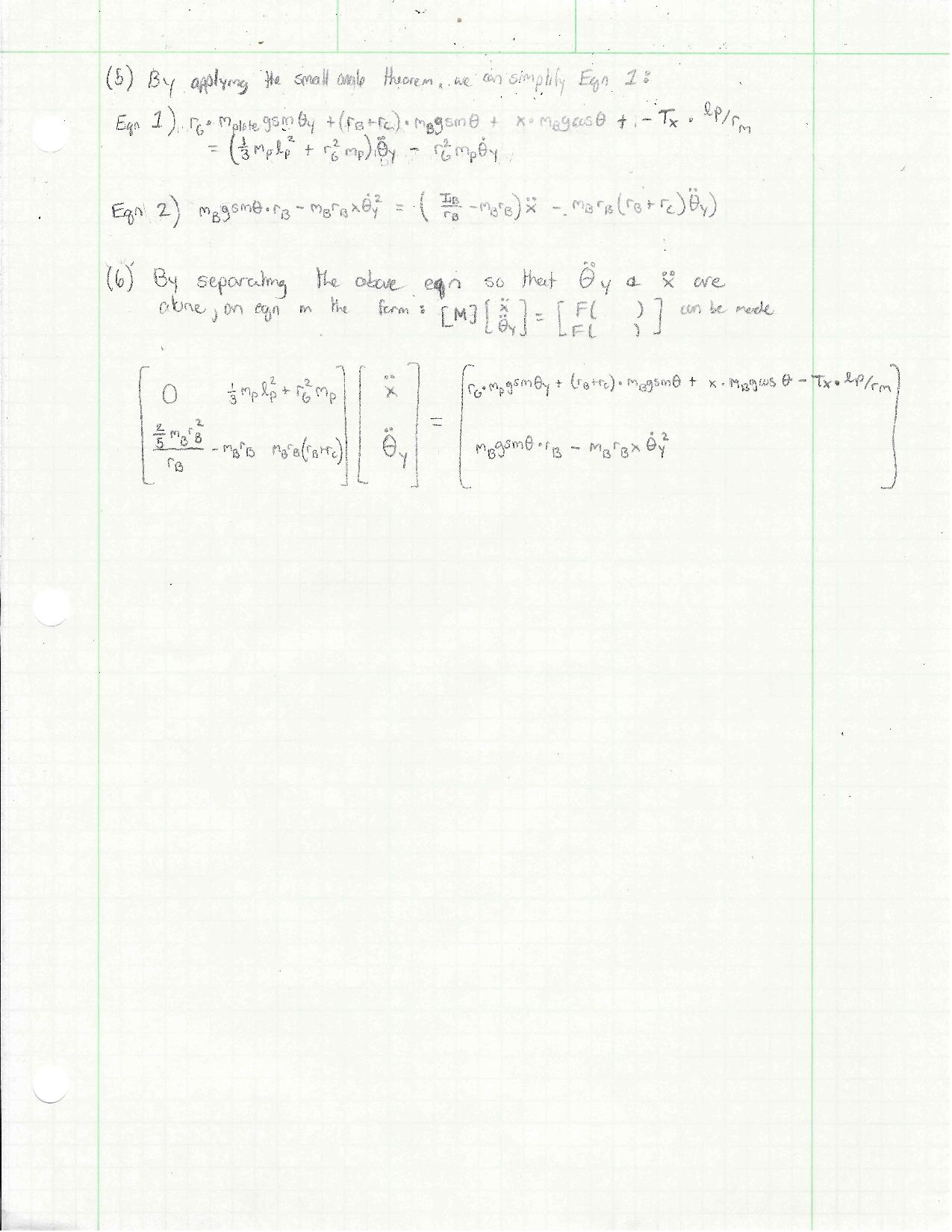
In this assignment, we were required to analyze and derive calculations from a given 4 body linkage. With the final goal being to relate motor speed to the tilt speed of the platform.
Hand Calculations
width = 50%
width = 50%
width = 50%
width = 50%
width = 50%
width = 50%
Generated on Sun Jun 13 2021 22:29:02 for Mechatronics Portfolio - Nick Greco by 1.9.0